MM総研大賞2023 大賞 受賞 <スマートソリューション部門>医療ICT分野 最優秀賞手術支援ロボット「hinotori サージカルロボットシステム」株式会社メディカロイド
2023年09月08日
日本の高いロボット技術が実現する
真の手術「支援」ロボット
|
国内初の手術支援ロボットhinotoriサージカルロボットシステム(以下、hinotori)は2020年8月に厚生労働省から製造販売承認を取得した。川崎重工業の産業用ロボット技術、シスメックスの医療分野で培われた知見を掛け合わせ、人間の腕と同様のサイズのコンパクトなロボットアームで手術者の繊細な動きを実現した。遠隔手術に対応しやすい設計に加え、通信事業者と共同で5Gをはじめとする高速通信規格を使った実証実験をするなど、汎用性の高い遠隔医療ソリューションへの積極的な姿勢が高く評価された。 |
 |

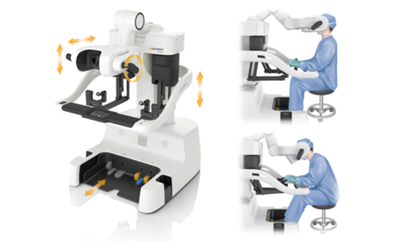
多様な姿勢に対応するサージョンコックピット
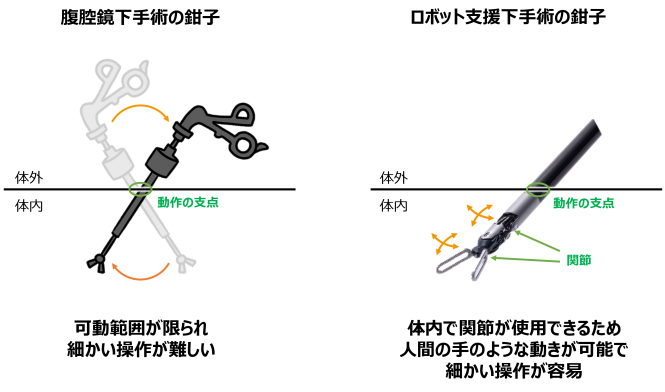
腹腔鏡下手術とロボット支援下手術の最大の違い
繊細な手技を支える細やかな配慮
「hinotori」はオペレーションユニットとサージョンコックピット、ビジョンユニットで構成された日本初の手術支援ロボットだ。開発したのは、川崎重工業とシスメックスの共同出資会社、メディカロイド(神戸市、宗藤康治代表取締役社長)だ。
hinotoriは日本が得意とする産業用ロボットの技術に加えて、「医師がロボットに術式を合わせるのではなく、医師が完成させた術式をロボットで再現する」という発想を軸に、開発と改良を進めてきた。
開発には数多くの困難もあった。最も大きな障壁となったのは、医師の意見を工学的な数値や指標に置き換えて機器に反映させることだったという。高いロボット技術は所持しているものの、使用した場合の操作感は実際に執刀したことのある医師にしか分からない。そういった操作感の差異をすり合わせるため幾度も試作と医師によるトライアルを重ね、現在の「hinotori」を造りあげた。
hinotoriならではの特徴として「人間の腕と同様のサイズのコンパクトなアーム」「72個のモーターを搭載」「ソフトウエアによる動作支点の設定」「多様な姿勢に対応するサージョンコックピット」などがある。
人間の腕と同様のサイズのコンパクトなアームは、アーム同士の干渉による手術の中断を防ぐ方法を模索する中で、人間の腕と同様のサイズにたどり着いた。4本を同時に動かしてもアームの動作範囲は人2人分に収まる。また、一般的なロボットのアームでは軸(関節)が6つのところをhinotoriは各アームに8軸使っており、人の腕のように他のアームを避ける、肘をたたんで回避するといった動きを可能にしている。
こうした高度な制御を支えているのが「72個のモーター」であり、産業用ロボットで培った技術だ。アームのデザインに加えてソフトウエアによる動作支点の設定ができることで助手の操作スペースを広く確保できる。
操作する医師が座るサージョンコックピットは幅広い姿勢や体格にもフィットする位置にセットでき、何時間にも及ぶ手術における医師の体への負担を軽減させる。
多くの医師から要望があった「ハンドクラッチ」機能を搭載した新バージョンの発売も近く予定しており、さらに医師を支えるロボットへと進化は続く。
医療は手術支援ロボットにより大きく変化する
hinotoriなどの手術支援ロボットと従来の腹腔鏡下手術の大きな違いは「鉗子」にある。従来の腹腔鏡下手術に用いる鉗子は直線的で可動域が限られる。しかも体内と体外で動作が反転するため、医師は常にそのことを念頭に手術することが求められる。人の体は臓器や病変部位の大きさ、位置が一人ひとり異なるうえ、血管や神経などを傷つけてしまうと患者の予後に大きく関わる組織も多く、それらを考慮しながら動作の限られる手技を行うには相応の経験が必要となる。
一方、hinotoriなどの手術支援ロボットは、鉗子に関節をつけることで体内に挿入した部分のみを動かすことが可能になった。これにより、医師の視野と動作方向が反転するという点や体の奥にある臓器など直線的な鉗子ではリーチしにくいといった点も解消できる。
また、腹腔鏡下手術の際には基本的に術者、助手、カメラ担当の3人の外科医が必要とされるが、手術支援ロボットは内視鏡カメラの操作もフットペダルで術者自身が操作できるため、カメラ担当への指示出しと意思疎通を図る手間が省け、よりスムーズに手術を進めることができる。
手術支援ロボットの登場により、これまでの腹腔鏡下手術でハードルとなっていた多くの問題が解消すると期待されている。ロボット支援下手術を経験した医師からは「従来の腹腔鏡下手術には戻れない」といった声もあがっているという。医療者の負担が減ることは手術を受ける患者の負担軽減にもつながり、手術支援ロボットが医療に与える影響の大きさがうかがえる。
開発者の想いと医師の声が実現させた国産ロボット
メディカロイド設立に至る最初のきっかけは、初代社長に就いた橋本康彦氏(現川崎重工業代表取締役社長執行役員)の「医療用ロボットを造りたい」という想いだった。橋本氏が川崎重工でロボット開発の責任者になったことを機に、医療用ロボットの開発に向けた動きが始まった。医療用ロボットを造るには医療に関する知識が必要不可欠。そこで橋本氏が声をかけたのが、友人であり歴史ある医療機器メーカに勤務していた浅野薫氏(現シスメックス代表取締役社長)だ。2012年、二人を中心とした「医療用ロボット研究会」が発足、1年ほどの期間を経て、2013年8月、メディカロイドとして正式に製品開発をスタートした。
設立から2年は医療現場でのロボット活用の可能性を探るためのマーケティングに費やした。当時、手術支援ロボットの先発品がすでに定着しつつあり、新たに参入するのは難しいと考えた。しかし、医師らの「産業用ロボットは世界シェアの半分を日本製が占めるのに、なぜ医療用ロボットは造られないのか。もっと日本の医療に合ったロボットがほしい」といった声が背中を押し、開発を進めた。
日本企業だからこその密なコミュニケーションにより、現場の医師が求めるニーズを詳細に把握し改良を重ね、2020年8月の製品化に至った。当初は泌尿器科のみの適応だったが、先発品も泌尿器科から導入されていたこともあり、泌尿器科は手術支援ロボットへの親和性が高いとされている。また、日本は諸外国に比べ、安全性に関する情報を重視する傾向にある。そこで、メディカロイドは製造販売承認取得当初は、安全に徐々に導入を進めていくこととした。現在では、全国で35台導入、手術は1300症例以上の実績を積んでいる(いずれも2022年度実績)。
導入施設は北海道から沖縄まで、大学病院などの大規模病院だけでなく100床規模の比較的小さな病院にも及ぶ。2022年には新たに婦人科、消化器科領域での適応も追加され、さらに導入は進むとみられる。
医療環境の差をなくす支援へ
hinotoriの支援対象は手術室内にとどまらない。開発当初から、距離の離れた医療施設同士をつなぐ遠隔手術支援の実現を見据えた設計をしている。遠隔操作を確実にすることで、hinotoriによって過疎地医療や医師育成支援の手段となることを目指している。
遠隔手術支援の実現に向けた取り組みとしては、2022年11月、通信ネットワークの全区間で光波長を専有するNTTのオールフォトニクス・ネットワーク(APN)IOWN1.0の実証環境(伝送距離120km)で、遅延やゆらぎがほぼないロボット制御と低遅延で高セキュリティな伝送の実証実験を実施。今年2月には、スタンドアローン(SA)方式の商用5Gを活用し、500km離れた東京と神戸の2拠点間での実証実験に成功した。
今年4月には、東京から約250km離れた愛知県豊明市の病院を結び、若手医師がモデル臓器を用いた模擬手術をし、東京にいる熟練医が遠隔でhinotoriの操作権を切り替えながら指導するという実証実験を実施。実験に使った東京の施設は常設のトレーニングセンターとして、今後も遠隔支援操作を含めたトレーニングに活用するとしている。
遠隔支援手術が実現すれば医師の地域差や経験による差が小さくなり、これまで遠隔地であったり、医師不足だったりなどの理由から手術を受けられなかった患者も減ることが期待される。