NEDOなど モノの形状になじむロボットハンドを開発
――リンゴの収穫など農作業向けに期待
2018年01月12日
NEDOとダブル技研㈱、東京都立産業技術高等専門学校は1月11日、単純制御で様々な形状のものを安定的にやさしくつかむことが可能なロボットハンド「からくり」の開発に成功したと発表した。
「からくり」は人間の手や指の微妙な構造を工学的に模倣したロボットハンド。人間に近似した骨格を与えることで指に加え手のひら(掌)も動くため、モノをつかむ際に物体の形状になじませてつかめる。加えて、全ての関節が人の腱のように結合し動くため、自動的にバランスが取れるという。この構造を応用し、3種類のロボットハンド「F-hand」「New D-hand」「オリガミハンド」を開発した。
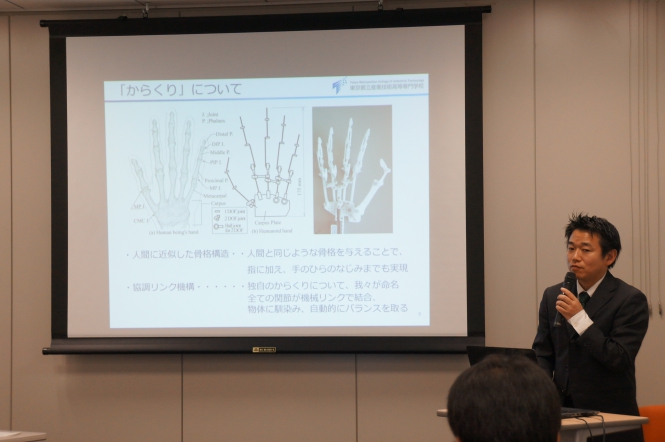
「からくり」を説明する東京都立産業技術高等専門学校 深谷直樹 准教授
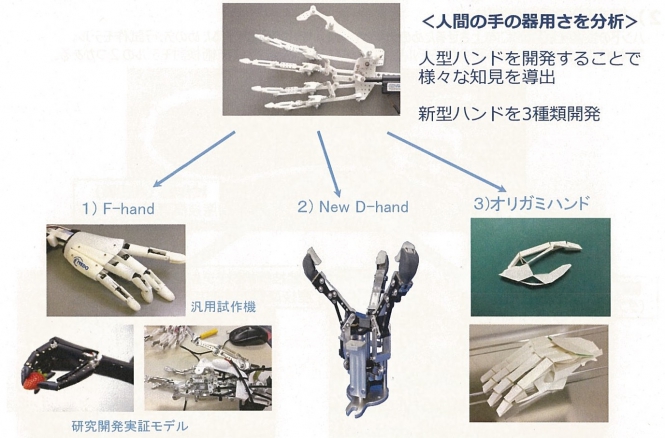
「からくり」から発展した3種「F-hand」「New D-hand」「オリガミハンド」
「F-hand」は人間の手の構造や大きさを模倣した5本指ロボットハンド。イチゴやシュークリームなど柔らかいものを傷つけずつかむことも、電動ドリルなどの工具をしっかりと握ることも可能。実験では予め指定した物体を機械学習させ、モノをつかむことに成功。手袋や耐熱手袋を使うこともできるため、農作業での果物の収穫など食品関係の多様な利用法が想定される。
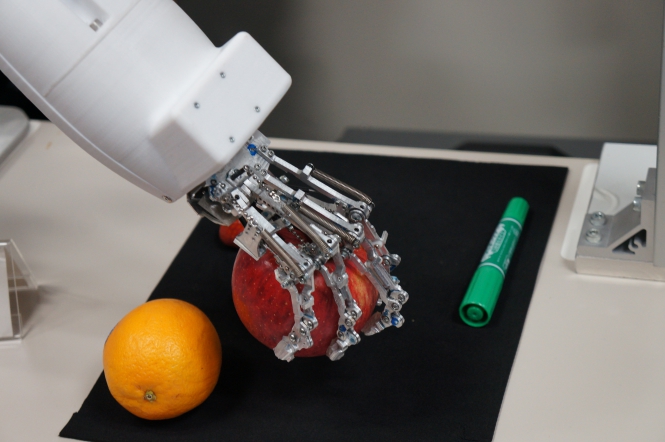
リンゴをつかむ「F-hand」。機械学習でリンゴの形状を学習している。
「New D-hand」は産業用としてニーズの高い3本指のロボットハンド。F-handに比べて大きく重い商品や備品をつかむことができる。モノの形状に合わせてなじむ機能により、洗剤の詰め替え用パックなどやわらかく、サイズが多様な形状の商品をやさしくつかむことができる。

「New D-hand」。殻なしゆで卵をつかむこともできる。
「オリガミハンド」は機械部品を一切使わずに1枚の紙だけで構成したロボットハンド。紙なので対象物が傷つかないうえ、極めて安価なため使い捨てができ、医療、食品の衛生分野や、宇宙や深海などの極限環境など、幅広い用途が期待される。
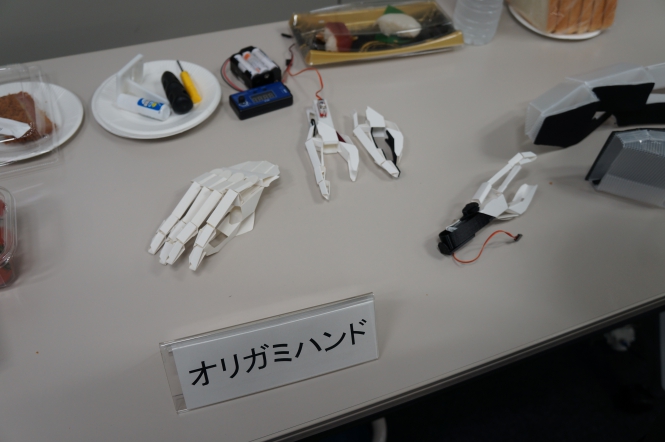
「オリガミハンド」。超軽量、安価、紙の大きさに応じて拡大縮小が容易。
ニュースリリース